Project Date: May 28, 2016
Summary
As part of the Summer 2016 Waterloo Engineering Competition (Senior Design), the goal was to create a device that would be able to reproduce four distinct sine and square waves. Our group decided to tackle this task by creating a mobile robot mounted with a pen to be able to draw the required plots. It should be noted that the robot was designed, built, and programmed in 6 hours.
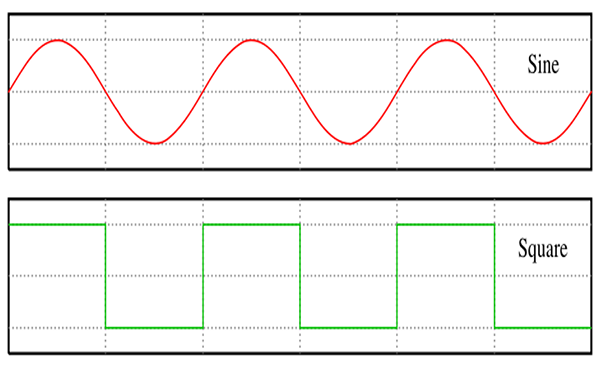
Competition objective was to reproduce sine and square waves.
Problems Faced
Numerous projects were faced during the duration of this project. To begin, the circuit used only allowed for the motors to move in one direction. This was chosen over a H-bridge architecture as it only required two transistors for the two motors as opposed to eight, which meant that the H-bridge architecture wasn’t possible due to cost constraints. This was a problem due to the fact that a proper square wave could not be drawn as it would always have curved edges. Additionally, it was found that the transistors available were not able to provide sufficient current to the motors to be able to move the robot. This was due to the fact that the robots weight was too high leading to a much greater starting torque requirement.
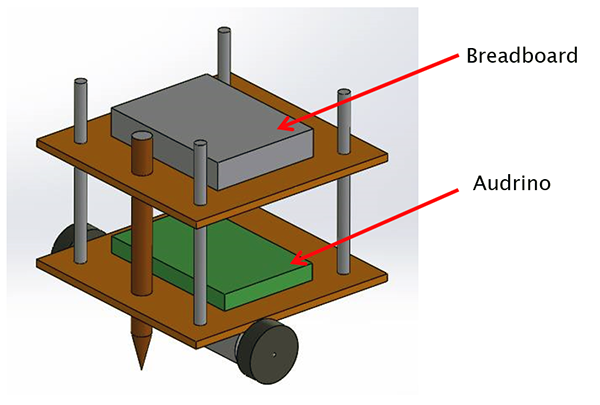
Our design consisted of a platform equipped with a pen and two wheels and motors.
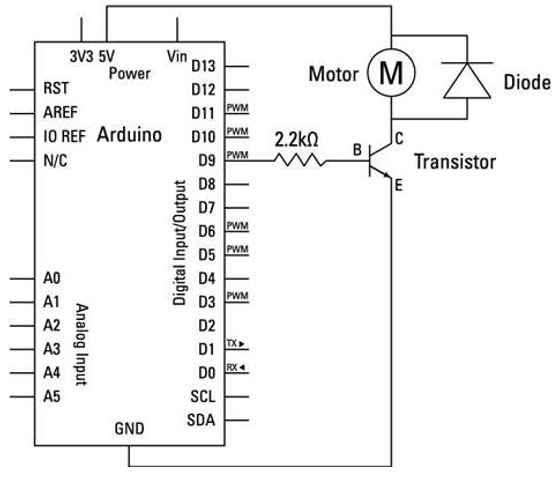
Electrical circuit shown to drive one motor with the arduino.
Results
As shown by the “Problems Faced” section, the robot was not able to move due to the lack of current that could be provided by the provided transistors. However, as the competition is graded on more than just the performance of the device, the team placed 3rd in the competition, as the team performed well in the design process, creativity, and presentation portions.
If I could do it again…
If I could do it again, I would create a plotter with a rotary to linear motion mechanism to which the pen is mounted. This plotter would have two motors, one powering the mechanism locating the pen within a horizontal region and a second feeding paper. This would be a more application specific design with less torque requirements and was the design that came first during the competition.
Credits
This project was completed with my group members Dhruv Sharma, Umer Kamran, and Jack Duan.