Project Date: March 23, 2018
Intro
As part of our capstone project, after months of brainstorming, my group and I decided to create an autonomous wall painting robot. This was based on research that indicated how often homes are delayed, number of annual injuries due to wall painting, and due to the size of the wall painting industry.
My Role
I was responsible for designing the electrical system (communications and power) of the robot. I determined the communications architecture and worked with the rest of the team to select the sensors for the final design. Additionally, I helped manufacture the components that needed to be manufactured in house. I also helped assemble, wire, and bring up all the subsystems, including the drivetrain, elevator, and the paint sprayer. I was involved in the testing and commissioning activities for the various subsystems. Furthermore, I was also involved in testing the paint spray mechanism, as well as, the development of the spray pump holder.
Mechanical Design
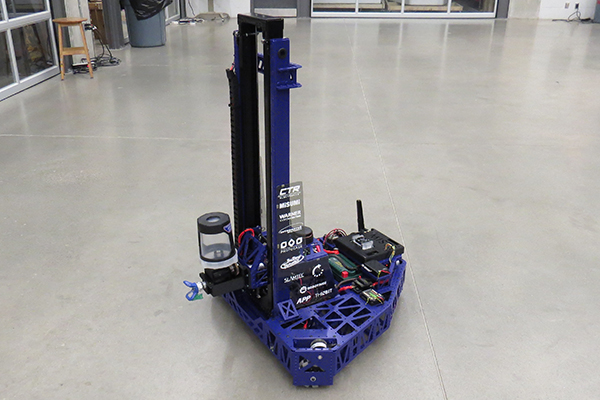
The mechanical design consists of a riveted aluminium sheet metal chassis equipped with a three-wheeled omni-wheel drivetrain, a continuous two-stage elevator, and a spraying mechanism based on the Graco Ultra Handheld Airless Sprayer.
Electrical Design
The electrical design consists of the nVidia Jetson TX1 as the main control board, the HERO development board as a secondary control board, an RPLidar A2-M8 lidar, five Talon SRX motor controllers, a Power Distribution Panel, and a BatteryTender BTL35A480C 12V Lithium Ion battery as the power source.
Software Design
The software design consists of Hector SLAM to map a given room, and then uses AMCL in addition to custom code to navigate to the closest point of the wall and run the painting routine for each of the discretized portions of wall.
Credits
Special thanks to my group members: Shubham Aggarwal, Baraa Hamodi, Hammad Mirza, and Dhruv Sharma.