Project Date: Dec. 17, 2015
Summary
As part of our sensors and instrumentation course, we had a lab each week in which we added a new piece of hardware to our PCB. This was done till our board had thermal, magnetic, and IR sensors, in addition to regulators to drive 2 motors. Once the boards were fully populated, the final task involved writing C code to run on the PIC microcontroller to be able to follow a track made of electrical tape and to stop when a magnet is sensed.
As part of the labs, we had to design the sensing circuit before the lab using the datasheets of the components and the reference designs taught in class. This was a good experience for me as I had no practical experience prior to this working with analog circuits and the analysis that goes into designing a circuit to meet the sensing requirements.
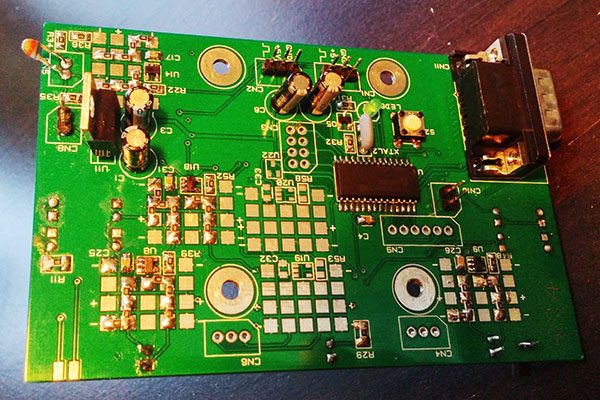
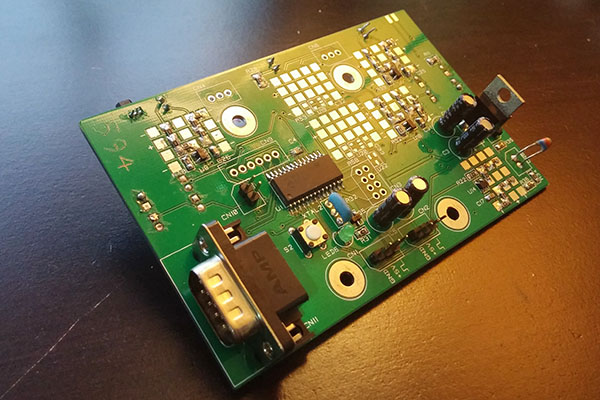
Top side of the line following robot’s PCB.
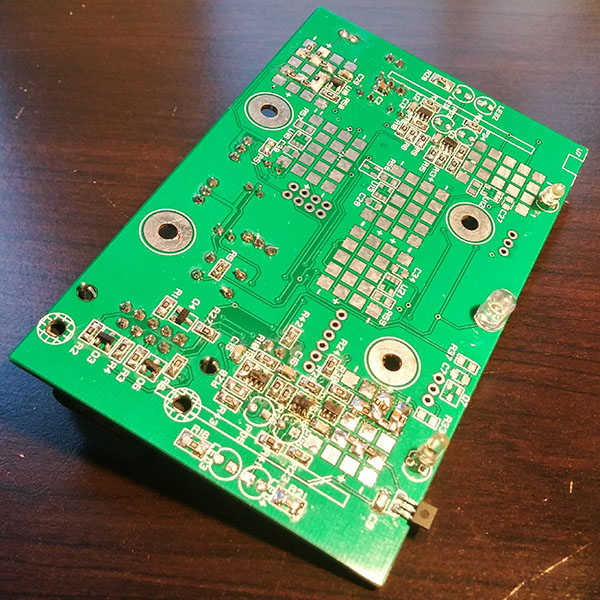
Back side of the line following robot’s PCB.
Sorry
Unfortunately, I do not have a video of our robot in action, however we were able to successfully complete the track within the allotted time. However, our robot did sense a magnet twice causing it to stop twice, which cost us a few marks. This could have been fixed simply changing the delay after which the robot senses the next magnet after moving away from one. This change was not made as we were only given one run on the track.
Credits
This project was completed with my group member Anton Dolgovykh.